



 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~三坐标协作机器人(Three-coordinate collaborative robots)通常采用“X、Y、Z”三个轴的设计,在三个自由度方向上进行准确操作。其主要优势在于灵活性和高精度,非常适合用于电子制造、精密组装、激光切割、喷涂和医疗器械等需要高定位精度的任务。由于其协作性,它们不仅能执行标准化的任务,还能与其他机器人或工作人员协同工作,适应不同的生产需求。
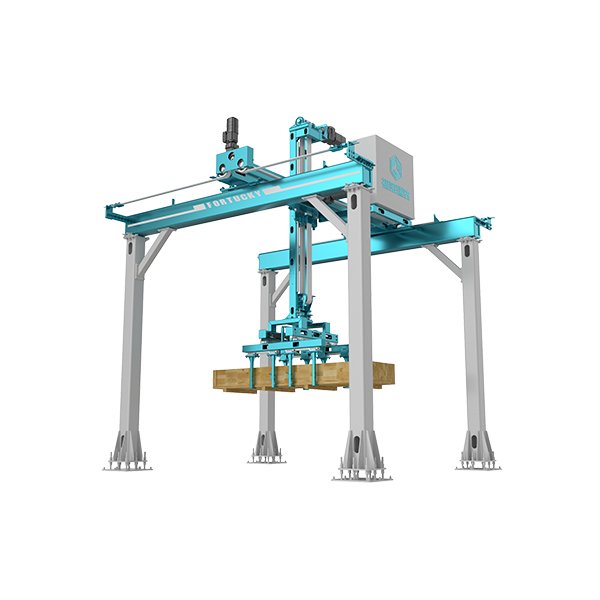
1.三维运动能力:三坐标协作机器人通常具备三维空间内的自由度,可以进行精确的直线或曲线路径操作。
2.高精度定位:采用先进的传感器和控制系统,能够实现精确的定位和操作,适用于高精度要求的任务,如装配、焊接、喷涂等。
3.协作工作:能够与人类和其他机器人协调作业,适应多样化的工作需求,且能在复杂的环境中进行高效操作。
4.简便编程:具有易于学习和操作的编程方式,用户无需深厚的机器人技术背景即可快速上手。


三坐标协作机器人
三坐标协作机器人(Three-coordinate collaborative robots)通常采用“X、Y、Z”三个轴的设计,在三个自由度方向上进行准确操作。其主要优势在于灵活性和高精度,非常适合用于电子制造、精密组装、激光切割、喷涂和医疗器械等需要高定位精度的任务。由于其协作性,它们不仅能执行标准化的任务,还能与其他机器人或工作人员协同工作,适应不同的生产需求。
1.三维运动能力:三坐标协作机器人通常具备三维空间内的自由度,可以进行精确的直线或曲线路径操作。
2.高精度定位:采用先进的传感器和控制系统,能够实现精确的定位和操作,适用于高精度要求的任务,如装配、焊接、喷涂等。
3.协作工作:能够与人类和其他机器人协调作业,适应多样化的工作需求,且能在复杂的环境中进行高效操作。
4.简便编程:具有易于学习和操作的编程方式,用户无需深厚的机器人技术背景即可快速上手。






